-- © Tous droits réservés 2004 - 2025 --
Servo mécanismes : suggestion...
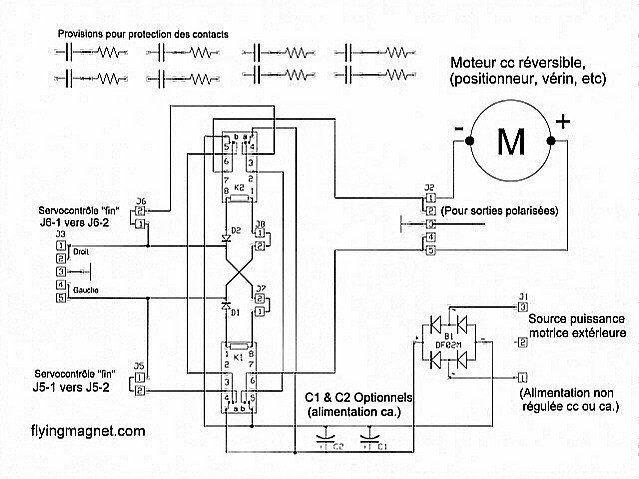 Relais : R bobine>400 Ohms Si dessin mal lisible : contacts NO 4-5 (extrémité), NF 6-3, COM 2-7 |
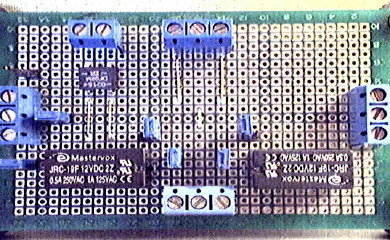 Exemple de carte interface (60 x 100) Les deux terminaux 3 points à gauche et à droite ne font pas partie de la description en haut : terminal 2 points : entrée source extérieure en dessous le pont B1, les condensateurs C1 et C2 ne sont pas installés terminal 3 points : sortie moteur en bas : terminal 3 points : entrée signal de positionnement en provenance de la carte servo-contrôle et au dessus entre les relais K1 et K2 : J5-J6 puis J7-J8 Les diodes D1 & D2 sont câblées en dessous. |
Concept et principe du montage |
Choix des modes de fonctionnement : Mode N°1 : Servo moteur en mode analogique normal : - J5 & J6 fermés; - J7 & J8 ouverts; - pas de source externe sur J1. Mode N°2 : Servo moteur alimenté par une source externe aux transistors de sortie durant le trajet d'approche, puis commuté en mode analogique près de la position d'équilibre : - J5 & J6 fermés; - J7 & J8 fermés; - une des sources acceptables appliquée à J1. Mode N°3 : Positionnement "approché" 1 bit seulement : - J5 & J6 ouverts - J7 & J8 fermés - une des sources acceptables appliquée à J1. Sources acceptables appliquées à J1 : Carte servo contrôle, avant régulation du ±12V. Un seul, les deux ensembles totalisent 36V, ce qui n'est pas un problème si l'élément moteur est en accord, mais il est peu probable qu'à la tension de retombée des relais, le moteur soit encore effectif, autant alors programmer le mode N°3; Externe, indépendante ou pas, régulée ou pas ±12V nominal (l'utilisation du 12V stabilisé de la carte n'apporte pas grand chose, seuls les transistors de sortie seraient mis à l'abri de la dissipation excessive, en dehors de cas particuliers utiliser l'alimentation CA de la carte servo contrôle (14Vca, 800 mA); Externe, indépendante ou pas, de l'ordre de 10-15 Vca. (les valeurs de C1 et C2 seront sélectionnées en conséquence). En premier choix logique, utiliser l'alimentation CA de la carte servo contrôle. Cas judicieux d'utilisation : Pendant la mise au point d'un nouveau système sous asservissement, délicat ou fragile, l'utilisation de cet interface en mode N°2, avec une source externe réglable depuis zéro volt, est très efficace contre les réactions violentes. |
Haut de page
00040883
-- © Tous droits réservés 2004 - 2025 --